Point cloud sampling

3 algorithms for even point cloud reduction
The number of points in a cloud may need to be evenly reduced.
For this purpose we wrote several scripts in Blender:
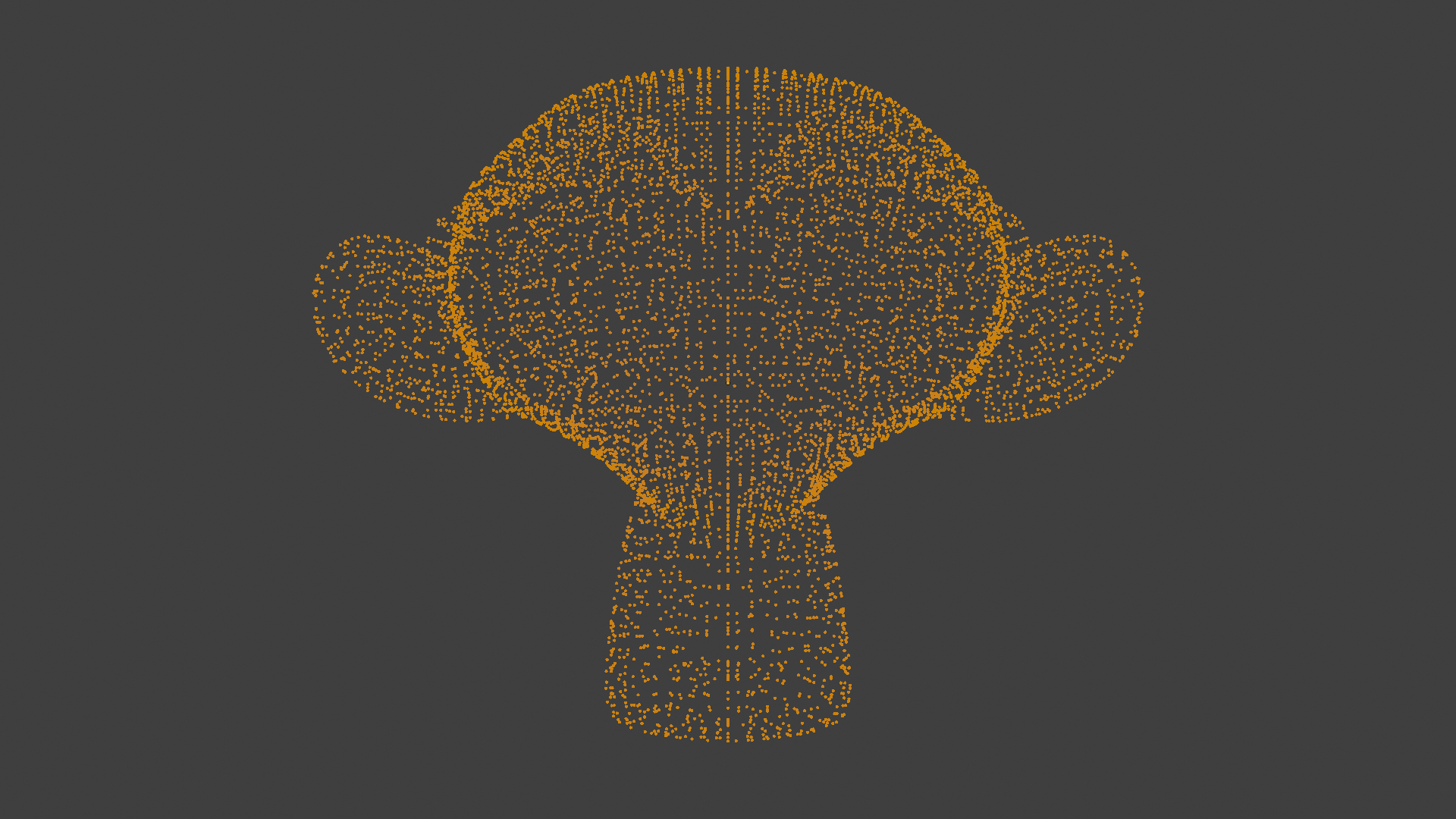
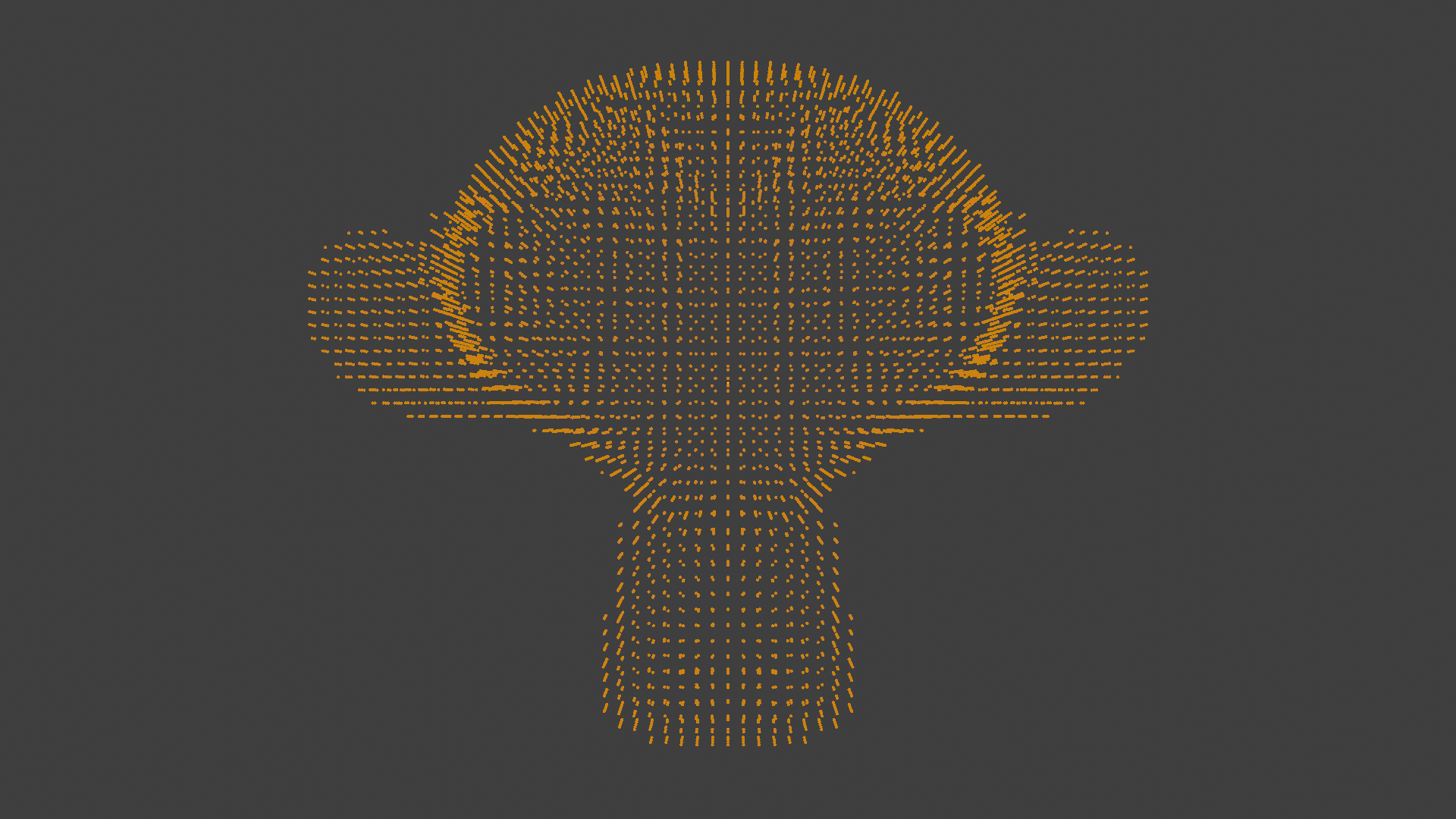
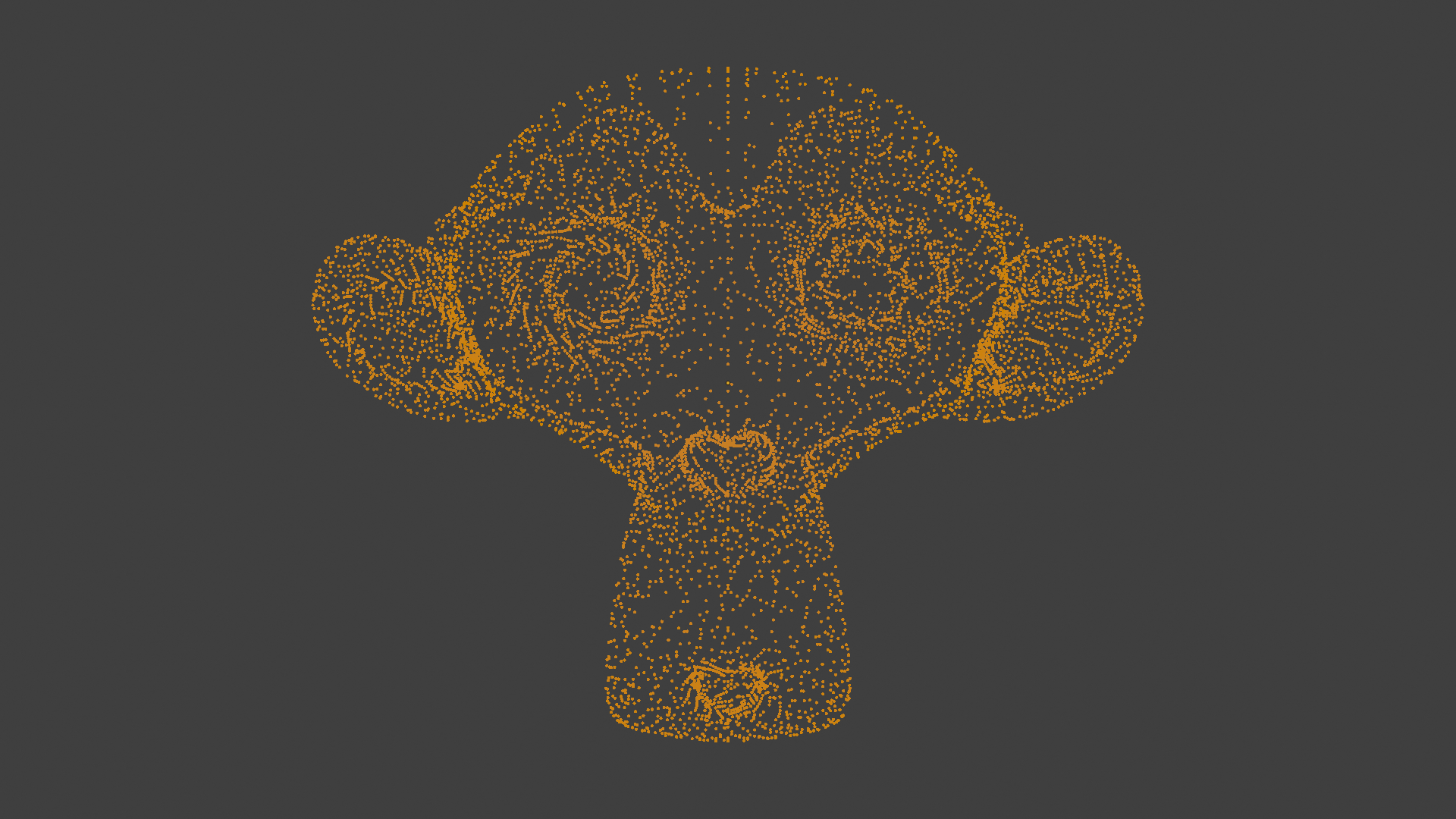
-Sampling using a voxel grid created around the object.The points that are located near the voxel middle(s) are preserved by its optional transfer to the voxel middle(s). It allows us to spread the points evenly.
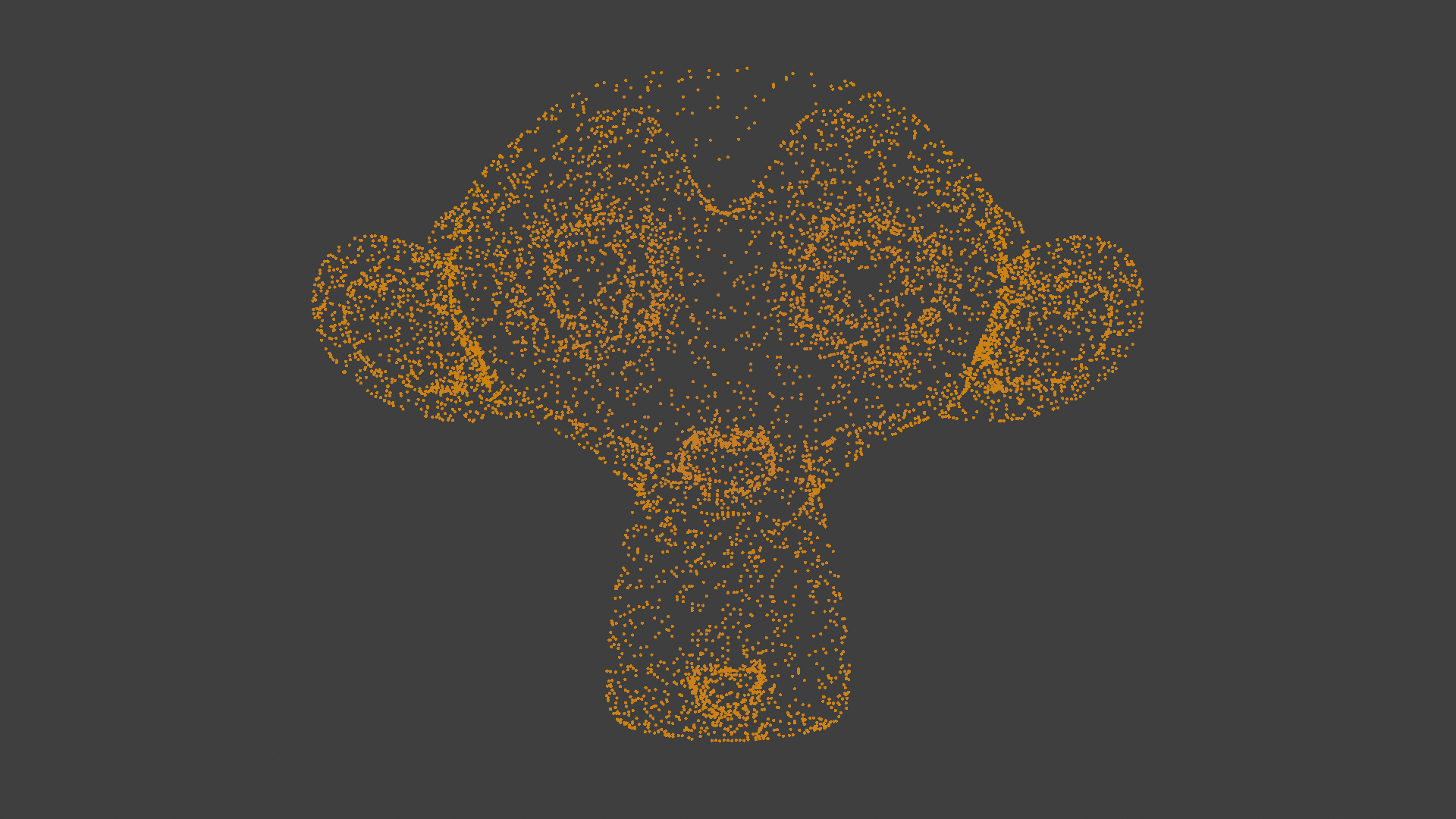
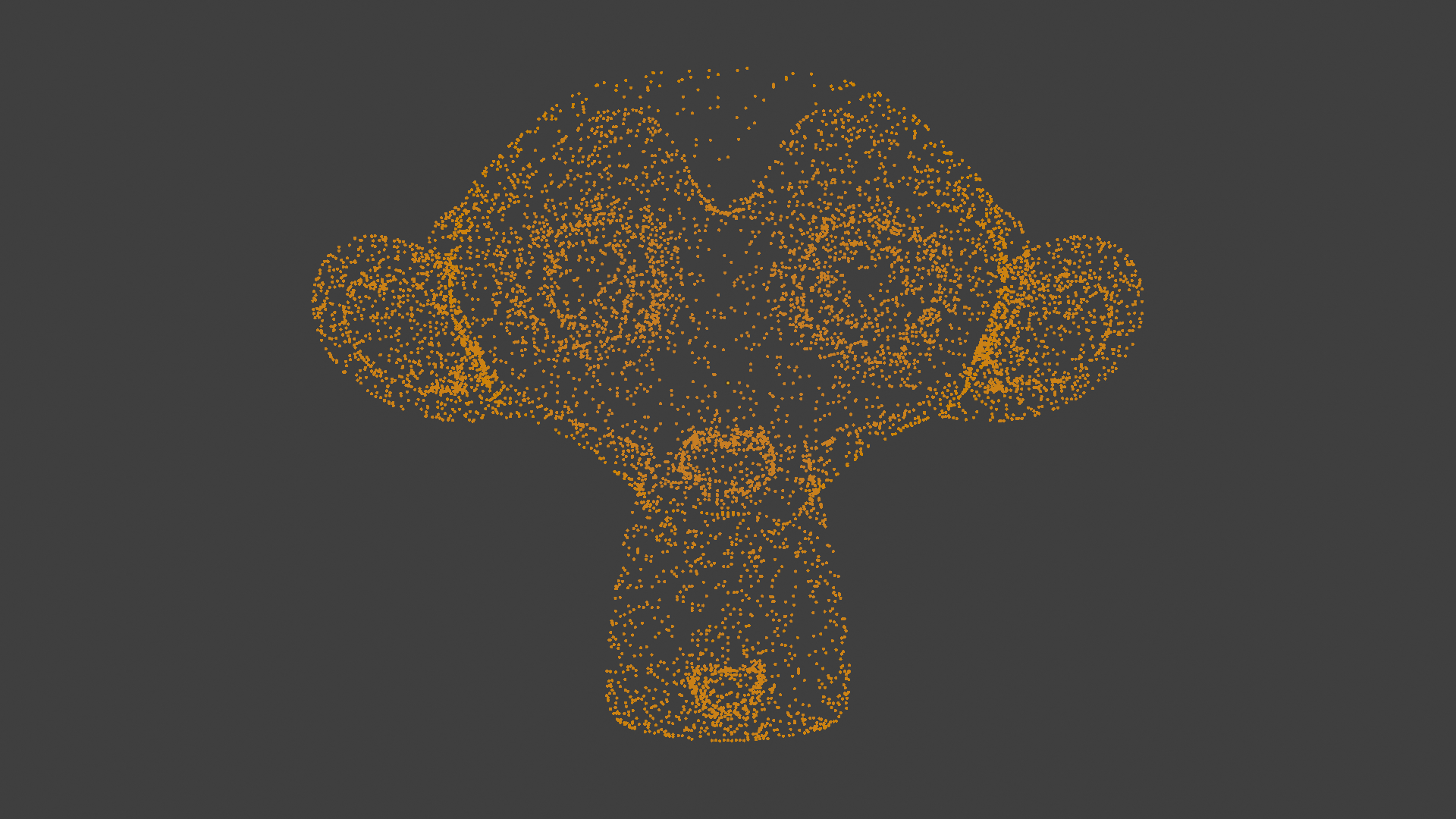
-Sampling using concentric spheres, which are built around the beginning of the local coordinates of an object or inside voxels. It allows us to preserve the initial relative density of the points.
Year of the project implementation: 2020